
I am an Assistant Professor in the Mechanical and Aerospace Engineering Department at UCLA and Director of the VECTR Laboratory. My broad research interests are nonlinear and optimal control theory, localization and mapping, and autonomy with application to aerospace systems. I am most interested in developing principled approaches that improve the reliability and performance of autonomous aerospace systems operating in diverse or uncertain conditions. My research advances core functionalities such as trajectory design, state estimation, mapping, and decision making under uncertainty. Autonomous exploration, emergency response, advanced urban mobility, orbit insertion, and spacecraft entry, descent, and landing are a few applications of interest.
I was a Postdoctoral Fellow at NASA-JPL (2019-2021) where I worked on the DARPA Subterranean Challenge leading the development of a fully autonomous sUAS capable of navigating perceptually challenging environments. I received my PhD (2019) and SM (2016) degrees from MIT where I worked on nonlinear control theory and high-speed MAV collision avoidance as part of the DARPA Fast Lightweight Autonomy program. I received my BS in Aerospace Engineering (2014) from UCLA and AS in Mathematics (2011) from El Camino College.
I can be reached at btlopez at ucla dot edu.
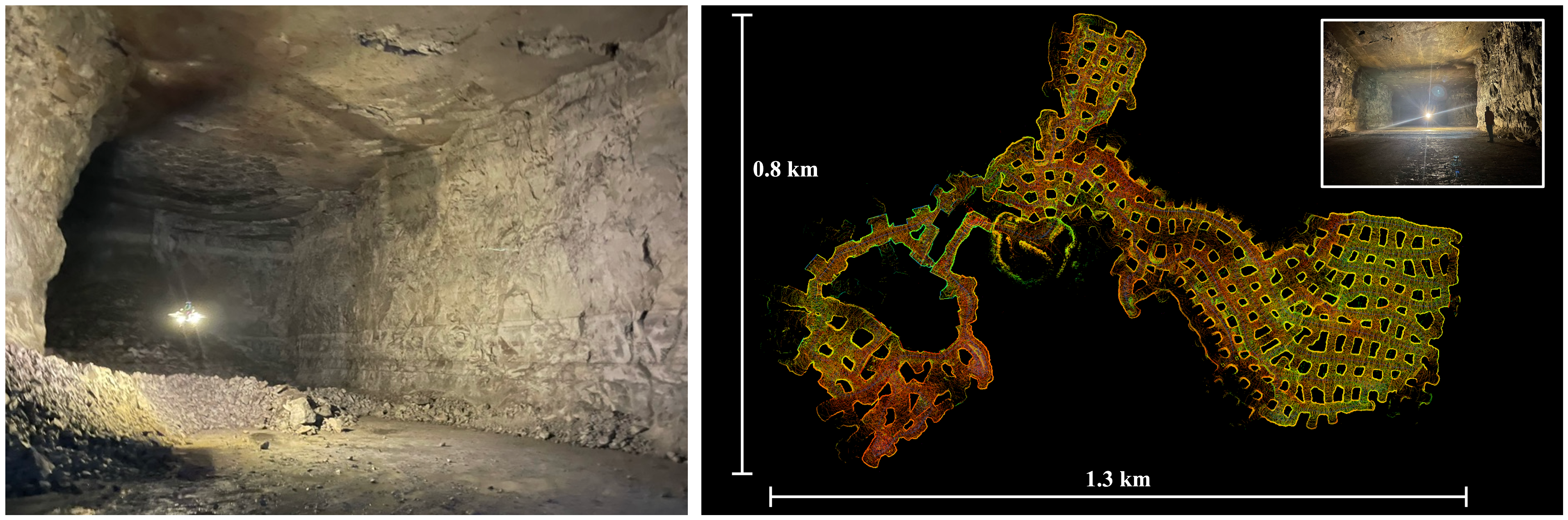 Left: VECTR Lab’s MAV flying autonomously in an underground Limestone mine
Left: VECTR Lab’s MAV flying autonomously in an underground Limestone mine
Right: Metric map of another limestone mine generated using VECTR Lab’s custom LiDAR-inertial odometry and mapping algorithm (github repo).
Notable Awards
UCLA Faculty Career Development Award (2023)
UCLA MAE Outstanding Teaching Award (2023)
Nominated for IEEE Control Systems Letters Outstanding Paper Award (2023)
First place in the IEEE Control Systems Society Video Clip Contest (2015)
NSF Graduate Research Fellowship (2014)
UCLA Aerospace Engineering Outstanding Bachelor of Science (2014)
Teaching
Autonomous Aerospace Systems (Fall 2022, 2024)
Optimal Control (Fall 2023, Spring 2024)
Aerospace Design Laboratory (Spring 2022, 2023, 2024, 2025)
Introduction to Feedback and Control Systems (Winter 2022, 2023, 2024, 2025)
Notable Projects
ARL Scalable, Adaptive, and Resilient Autonomy CRA (Role: PI)
DARPA Subterranean Challenge (Role: MAV Lead)
DARPA Fast Lightweight Autonomy Program (Role: Planning and Control Lead)